
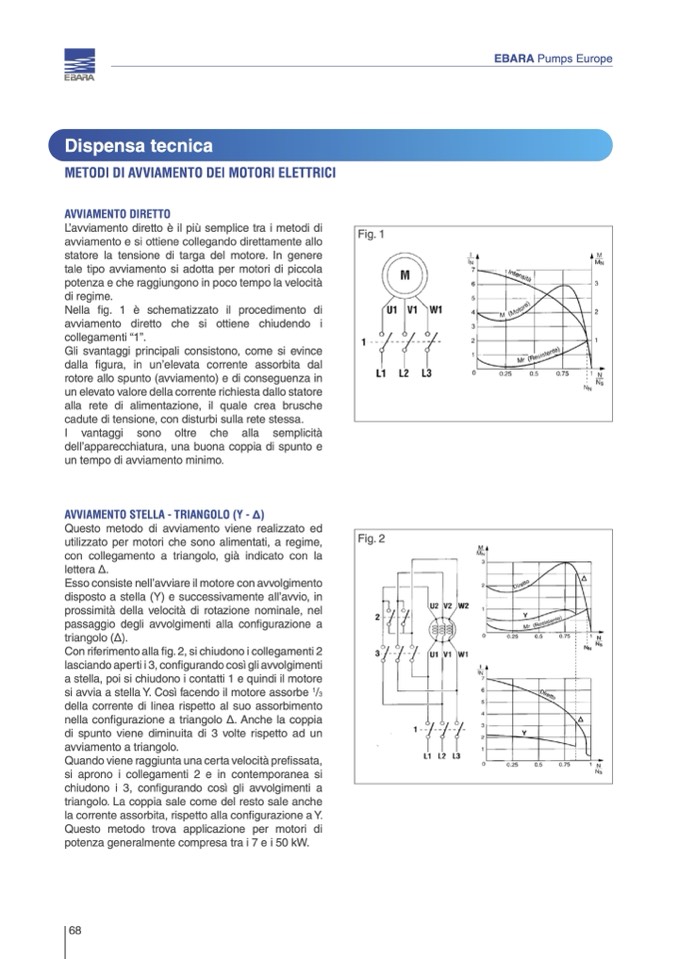
L’avviamento diretto è il più semplice tra i metodi di
avviamento e si ottiene collegando direttamente allo
statore la tensione di targa del motore. In genere
tale tipo avviamento si adotta per motori di piccola
potenza e che raggiungono in poco tempo la velocità
di regime.
Nella fig. 1 è schematizzato il procedimento di
avviamento diretto che si ottiene chiudendo i
collegamenti “1”.
Gli svantaggi principali consistono, come si evince
dalla figura, in un’elevata corrente assorbita dal
rotore allo spunto (avviamento) e di conseguenza in
un elevato valore della corrente richiesta dallo statore
alla rete di alimentazione, il quale crea brusche
cadute di tensione, con disturbi sulla rete stessa.
I vantaggi sono oltre che alla semplicità
dell’apparecchiatura, una buona coppia di spunto e
un tempo di avviamento minimo.
Questo metodo di avviamento viene realizzato ed
utilizzato per motori che sono alimentati, a regime,
con collegamento a triangolo, gi
à indicato con la
lettera Δ.
Esso consiste nell’avviare il motore con avvolgimento
disposto a stella (Y) e successivamente all’avvio, in
prossimità della velocità di rotazione nominale, nel
passaggio degli avvolgimenti alla con
figurazione a
triangolo (Δ).
Con riferimento alla fig. 2, si chiudono i collegamenti 2
lasciando aperti i 3, configurando così gli avvolgimenti
a stella, poi si chiudono i contatti 1 e quindi il motore
si avvia a stella Y. Così facendo il motore assorbe
1
/
3
della corrente di linea rispetto al suo assorbimento
nella configurazione a triangolo Δ. Anche la coppia
di spunto viene diminuita di 3 volte rispetto ad un
avviamento a triangolo.
Quando viene raggiunta una certa velocità prefissata,
si aprono i collegamenti 2 e in contemporanea si
chiudono i 3, configurando così gli avvolgimenti a
triangolo. La coppia sale come del resto sale anche
la corrente assorbita, rispetto alla configurazione a Y.
Questo metodo trova applicazione per motori di
potenza generalmente compresa tra i 7 e i 50 kW.
Fig. 1
Fig. 2
68

